EMAS 2025 Proceedings Available
Workshop Programme
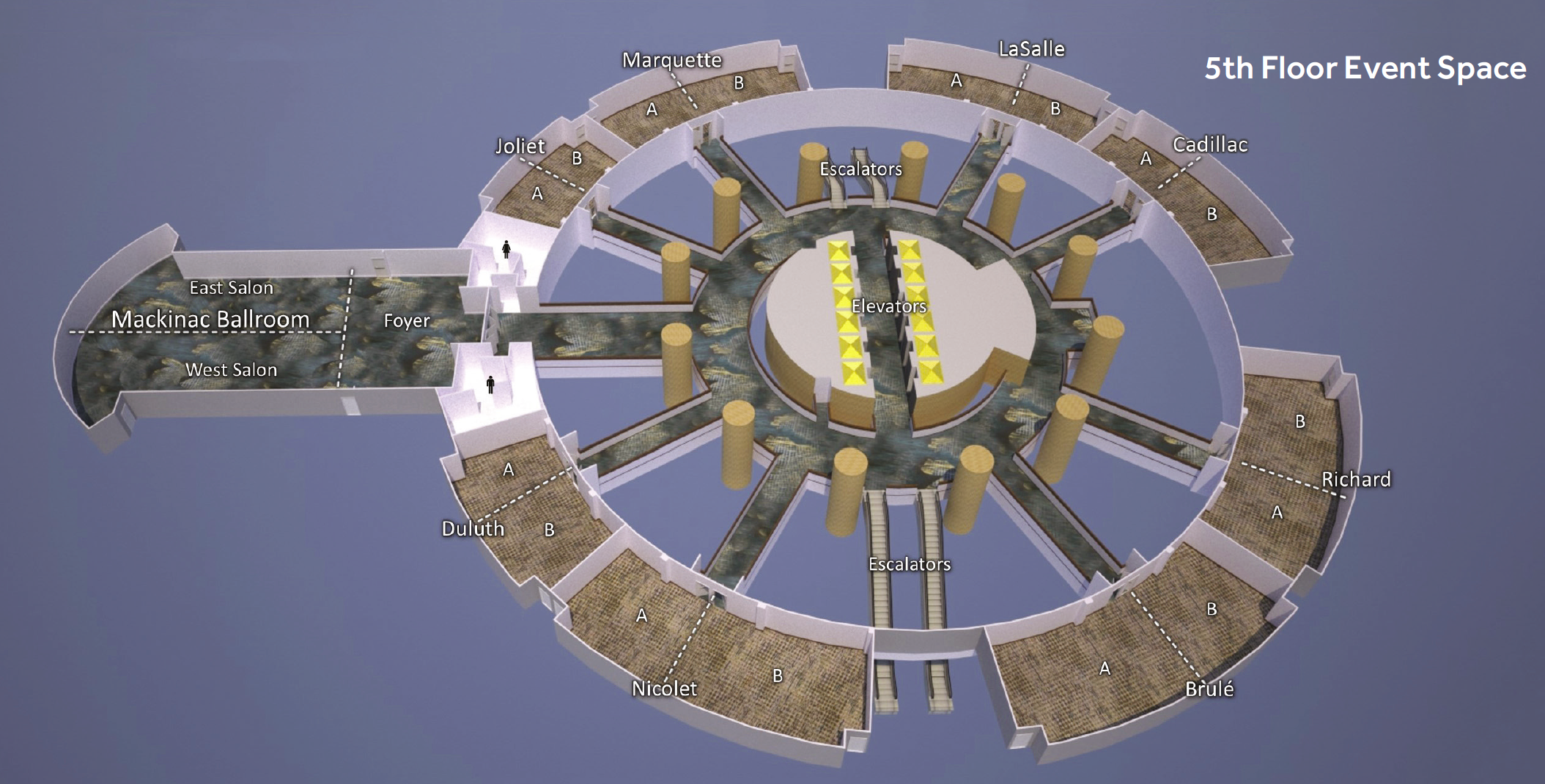
Room: Brule A, 5th Floor - Venue Map
{kind=link}
- Short papers are up to 20 minutes (up to 15 minutes of presentation and at least 5 minutes of questions).
- Student papers are up to 25 minutes (up to 20 minutes of presentation and at least 5 minutes of questions).
- Full papers are up to 25 minutes (up to 20 minutes of presentation and at least 5 minutes of questions).
| Time | Day 1 Activities | Day 2 Activities |
|---|---|---|
| 08:30-09:00 | Opening and Welcome | Welcome |
| 09:00-10:00 | Session 1 | Session 5 |
| 10:00-10:45 | Coffee | Coffee |
| 10:45-12:30 | Session 2 | Session 6 |
| 12:30-14:00 | Lunch | Lunch |
| 14:00-15:00 | Keynote | Panel |
| 15:00-15:45 | Session 3 | Open Floor Workshop |
| 15:45-16:30 | Coffee Break | Coffee Break |
| 16:30-17:10 | Session 4 | Open Floor Workshop & Community Discussion |
| 17:10+ | Closing | Awards and Closing |
Keynote and Panel
Keynote (Day 1)
Multiagent systems in the defense of civilian airspace against emerging UAV/UAS threats
Prof. Eric Matson
Abstract
In 2015, a small class 1 drone flew on to the protected grounds of the White House in Washington, D.C., USA, one of the most protected spaces in the world. The inability to detect, track or remediate this threat, at that time, was basically non-existent. The capability did not exist as it was only starting to be recognized as a emerging threat. Ten years later the use of semi-autonomous to autonomous UAVs to carry out offensive threats has not only become common place, but a worldwide emerging industry, primarily developed by many bad actors. Given the new threat, more intense focus is being placed not on the threat, but more so on how to define, prevent, deter and mitigate these threats, over both military and civilian spaces. The use of agent-based systems has been employed since 2015 to detect, track, categorize, mitigate and forensically analyze autonomous UAV/UAS attacks. The ability of MAS to integrate sensors, communicate quickly and come to decisions, aids the decision-making human process to successfully deter an attack that may only last a few second. This is why the use of MAS in the defensive function has been effective, since 2015, when it was used in the first ever documented autonomous drone to drone kill and has grown become a more effective toolset in the present day. This presentation will show the development of this MAS system.
Bio
 Dr. Eric Matson is an Professor in the Department of Computer and Information Technology at Purdue University.
He has earned a Ph.D. in Computer Science from the University of Cincinnati College of Engineering, a Master of Software Engineering (M.S.E.) from Kansas State University, a Master of Business Administration (M.B.A) from Ohio State University and a Bachelors (B.S.) in Computer Science from Kansas State University.
Dr. Matson was named a Purdue University Faculty Scholar, 2016 to 2021.
Dr. Matson worked in industry for 13 years for companies like AT&T and Schneider Electric.
His current projects investigate how we use GPS, multi-robot coordination, automatic reconfiguring of robotic-based networks and multiagent modeling and organizations.
Dr. Eric Matson is an Professor in the Department of Computer and Information Technology at Purdue University.
He has earned a Ph.D. in Computer Science from the University of Cincinnati College of Engineering, a Master of Software Engineering (M.S.E.) from Kansas State University, a Master of Business Administration (M.B.A) from Ohio State University and a Bachelors (B.S.) in Computer Science from Kansas State University.
Dr. Matson was named a Purdue University Faculty Scholar, 2016 to 2021.
Dr. Matson worked in industry for 13 years for companies like AT&T and Schneider Electric.
His current projects investigate how we use GPS, multi-robot coordination, automatic reconfiguring of robotic-based networks and multiagent modeling and organizations.
Panel (Day 2)
Special Theme on ML- and Data-Driven Approaches
Joint panel with COINE
This year, two AAMAS workshops (EMAS and COINE) feature a special focus on the intersection of machine learning and agent-based systems. To explore this issue, we are organizing a panel discussion with experts from both the ML and agent communities to examine key challenges and opportunities in bridging these fields.
Panelist
- Dr. Louise Dennis (Universty of Manchester)
- Dr. Marc Lanctot (Google DeepMind)
- Prof. Eric Matson (Purdue Universty)
Moderators: Jaime Simão Sichman and Sebastian Rodriguez
Louise Dennis
 Louise Dennis is a Reader at the University of Manchester.
Her background is in artificial intelligence and more specifically in agent and autonomous systems and automated reasoning.
She has worked on the development of several automated reasoning and theorem proving tools, most notably the Agent JPF model checker for BDI agent languages; the lambda-clam proof planning system (also archived at the Theorem Prover Museum); and the PROSPER Toolkit for integrating an interactive theorem prover (HOL) with automated reasoning tools (such as SAT solvers) and Case/CAD tools.
More recently she has investigated rational agent programming languages and architectures for autonomous systems, with a particular emphasis on verifiable systems and ethical reasoning.
Louise Dennis is a Reader at the University of Manchester.
Her background is in artificial intelligence and more specifically in agent and autonomous systems and automated reasoning.
She has worked on the development of several automated reasoning and theorem proving tools, most notably the Agent JPF model checker for BDI agent languages; the lambda-clam proof planning system (also archived at the Theorem Prover Museum); and the PROSPER Toolkit for integrating an interactive theorem prover (HOL) with automated reasoning tools (such as SAT solvers) and Case/CAD tools.
More recently she has investigated rational agent programming languages and architectures for autonomous systems, with a particular emphasis on verifiable systems and ethical reasoning.
Marc Lanctot
 Marc is a Research Scientist at Google DeepMind.
His work focuses on general multiagent learning and planning, computational game theory, reinforcement learning, and game-tree search.
Prior to joining DeepMind, he was a postdoctoral researcher at the Games and AI Group at Maastricht University, where he collaborated with Mark Winands.
He completed his PhD at the University of Alberta under the supervision of Michael Bowling, with research centered on sampling algorithms for equilibrium computation and decision-making in games.
Before his PhD, he earned both his undergraduate and Master’s degrees at McGill University’s School of Computer Science, conducting research in the Games Research Group under Clark Verbrugge.
Marc is a Research Scientist at Google DeepMind.
His work focuses on general multiagent learning and planning, computational game theory, reinforcement learning, and game-tree search.
Prior to joining DeepMind, he was a postdoctoral researcher at the Games and AI Group at Maastricht University, where he collaborated with Mark Winands.
He completed his PhD at the University of Alberta under the supervision of Michael Bowling, with research centered on sampling algorithms for equilibrium computation and decision-making in games.
Before his PhD, he earned both his undergraduate and Master’s degrees at McGill University’s School of Computer Science, conducting research in the Games Research Group under Clark Verbrugge.
Eric Matson
Dr. Eric Matson is an Professor in the Department of Computer and Information Technology at Purdue University.
He has earned a Ph.D. in Computer Science from the University of Cincinnati College of Engineering, a Master of Software Engineering (M.S.E.) from Kansas State University, a Master of Business Administration (M.B.A) from Ohio State University and a Bachelors (B.S.) in Computer Science from Kansas State University.
Dr. Matson was named a Purdue University Faculty Scholar, 2016 to 2021.
Dr. Matson worked in industry for 13 years for companies like AT&T and Schneider Electric.
His current projects investigate how we use GPS, multi-robot coordination, automatic reconfiguring of robotic-based networks and multiagent modeling and organizations.
Open Floor Workshop (Day 2)
“Engineering Agents in the Era of Data and LLMs: Bridging Architectures and Learning”
⏱️ Duration: Activity will be split in two sessions. Please see schedule above.
🧑💻 Audience: EMAS participants (experts in AOSE, formal methods, ML)
🎯 Goal:
The aim of this hands-on session is to collaboratively develop a research roadmap for the EMAS community. Participants will identify key challenges and opportunities in engineering multiagent systems—particularly in contexts that integrate learning and reasoning—and propose concrete solution pathways. To anchor the discussion, we will use the search and rescue scenario. Insights from this session will contribute to a joint publication in the workshop’s post-proceedings.
EMAS Community Discussion (Day 2)
EMAS community is a very interactive, hands-on community that thrives from discussions of new software technologies and their use for engineering multiagent systems. This event will be focused on allow all members of our community to provide feedback and our workshop and shape future editions.
We are counting on your contributions
Technical Sessions
Session 1
Chair: Sebastian Rodriguez
-
Holonic Active Distillation for Scalable Multi-Agent Learning in Multi-Sensor Systems
Dani Manjah, Tim Bary, Benoit Macq, Stéphane Galland
Download paper -
Teamwork in Adversarial Video Games
Barbara Dunin-Keplicz, Rafał Tyl
Download paper
Session 2
Chair: Angelo FERRANDO
-
LTL Semantics for Tumato: A Declarative Approach to Autonomous Agent Planning
Jan Vermaelen, Tom Holvoet
Download paper -
An agentic system of collaborative AI agents with reinforcement-learned subsystem improvements, applied to parsing form-like documents
Ayesha Amjad, Saurav Sthapit, Tahir Syed
Download paper -
Octo-planner: On-device Language Model for Planner-Action Agents
Wei Chen, Zhiyuan Li, Zhen Guo, Yikang Shen
Download paper -
Engineering Practical Mean-Field Games with Networked Communication, Function Approximation and Population Estimation
Patrick Benjamin, Alessandro Abate
Download paper
Session 3 (Short Papers)
Chair: Lu Feng
-
MEDiTATe: a First Step of a Journey from BDI to Neuroscience, and Back
Angelo Ferrando, Andrea Gatti, Viviana Mascardi
Download paper -
Actors for Engineering Scalable Multiagent Systems
Amit K. Chopra, Munindar P. Singh
Download paper
Session 4 (Student papers)
Chair: Lu Feng
-
Adaptive Modular Agent Archcitecture for Hybrid Two-Level Reasoning
Dmitry Gnatyshak, Julian Padget, Sergio Alvarez-Napagao, Ulises Cortés
Download paper -
Towards Engineering LLM-Enhanced Multi-Agent Systems: A Critical Examination of Roles
Tansu Zafer Asici, Önder GÜRCAN, Geylani Kardas
Download paper
Session 5
Chair: Angelo FERRANDO
-
FALAA: Framework for the Abstraction of Language Agent Architectures
Nicolas Brandstetter, Felipe Bravo-Marquez, Federico Olmedo
Download paper -
Towards Explainable BDI Agents for End-users
Marcel Mauri, Mirjam Minor
Download paper
Session 6
Chair: John Thangarajah
-
A Multi-Agent Collaborative Reasoning Framework for Generating Physics Puzzles
Binze Li, Soham Hans, Volkan Ustun
Download paper -
Oops, I Heard That! Situated Communication with Locality-Aware KQML
Angelo Ferrando, Andrea Gatti, Viviana Mascardi
Download paper -
Fluid: Social Norms-Based Multiagent Systems on the Web
Amit K. Chopra, Munindar P. Singh
Download paper